Determinant
In linear algebra, the determinant is a value that can be computed from the elements of a square matrix and encodes certain properties of the linear transformation described by the matrix. The determinant of a matrix A is denoted det(A), det A, or |A|. Geometrically, it can be viewed as the volume scaling factor of the linear transformation described by the matrix. This is also the signed volume of the n-dimensional parallelepiped spanned by the column or row vectors of the matrix. The determinant is positive or negative according to whether the linear mapping preserves or reverses the orientation of n-space.
In the case of a 2 × 2 matrix the determinant may be defined as:
- |A|=|abcd|=ad−bc.{displaystyle {begin{aligned}|A|={begin{vmatrix}a&b\c&dend{vmatrix}}=ad-bc.end{aligned}}}

Similarly, for a 3 × 3 matrix A, its determinant is:
- |A|=|abcdefghi|=a|◻◻◻◻ef◻hi|−b|◻◻◻d◻fg◻i|+c|◻◻◻de◻gh◻|=a|efhi|−b|dfgi|+c|degh|=aei+bfg+cdh−ceg−bdi−afh.{displaystyle {begin{aligned}|A|={begin{vmatrix}a&b&c\d&e&f\g&h&iend{vmatrix}}&=a,{begin{vmatrix}Box &Box &Box \Box &e&f\Box &h&iend{vmatrix}}-b,{begin{vmatrix}Box &Box &Box \d&Box &f\g&Box &iend{vmatrix}}+c,{begin{vmatrix}Box &Box &Box \d&e&Box \g&h&Box end{vmatrix}}\[3pt]&=a,{begin{vmatrix}e&f\h&iend{vmatrix}}-b,{begin{vmatrix}d&f\g&iend{vmatrix}}+c,{begin{vmatrix}d&e\g&hend{vmatrix}}\[3pt]&=aei+bfg+cdh-ceg-bdi-afh.end{aligned}}}
![{displaystyle {begin{aligned}|A|={begin{vmatrix}a&b&c\d&e&f\g&h&iend{vmatrix}}&=a,{begin{vmatrix}Box &Box &Box \Box &e&f\Box &h&iend{vmatrix}}-b,{begin{vmatrix}Box &Box &Box \d&Box &f\g&Box &iend{vmatrix}}+c,{begin{vmatrix}Box &Box &Box \d&e&Box \g&h&Box end{vmatrix}}\[3pt]&=a,{begin{vmatrix}e&f\h&iend{vmatrix}}-b,{begin{vmatrix}d&f\g&iend{vmatrix}}+c,{begin{vmatrix}d&e\g&hend{vmatrix}}\[3pt]&=aei+bfg+cdh-ceg-bdi-afh.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/14f2f2a449d6d152ee71261e47551aa0a31c801e)
Each determinant of a 2 × 2 matrix in this equation is called a "minor" of the matrix A. This procedure can be extended to give a recursive definition for the determinant of an n × n matrix, the minor expansion formula.
Determinants occur throughout mathematics. For example, a matrix is often used to represent the coefficients in a system of linear equations, and the determinant can be used to solve those equations, although other methods of solution are much more computationally efficient. In linear algebra, a matrix (with entries in a field) is invertible if and only if its determinant is non-zero, and correspondingly the matrix is singular if and only if its determinant is zero. This leads to the use of determinants in defining the characteristic polynomial of a matrix, whose roots are the eigenvalues. In analytic geometry, determinants express the signed n-dimensional volumes of n-dimensional parallelepipeds. This leads to the use of determinants in calculus, the Jacobian determinant in the change of variables rule for integrals of functions of several variables. Determinants appear frequently in algebraic identities such as the Vandermonde identity.
Determinants possess many algebraic properties, including that the determinant of a product of matrices is equal to the product of determinants. Special types of matrices have special determinants; for example, the determinant of an orthogonal matrix is always plus or minus one, and the determinant of a complex Hermitian matrix is always real.
Contents
1 Geometric meaning
2 Definition
2.1 2 × 2 matrices
2.2 3 × 3 matrices
2.3 n × n matrices
2.3.1 Levi-Civita symbol
3 Properties of the determinant
3.1 Schur complement
3.2 Multiplicativity and matrix groups
3.3 Laplace's formula and the adjugate matrix
3.4 Sylvester's determinant theorem
4 Properties of the determinant in relation to other notions
4.1 Relation to eigenvalues and trace
4.2 Upper and lower bounds
4.3 Cramer's rule
4.4 Block matrices
4.5 Derivative
5 Abstract algebraic aspects
5.1 Determinant of an endomorphism
5.2 Exterior algebra
5.2.1 Transformation on alternating multilinear n-forms
5.3 Square matrices over commutative rings and abstract properties
6 Generalizations and related notions
6.1 Infinite matrices
6.2 Operators in von Neumann algebras
6.3 Related notions for non-commutative rings
6.4 Further variants
7 Calculation
7.1 Decomposition methods
7.2 Further methods
8 History
9 Applications
9.1 Linear independence
9.2 Orientation of a basis
9.3 Volume and Jacobian determinant
9.4 Vandermonde determinant (alternant)
9.5 Circulants
10 See also
11 Notes
12 References
13 External links
Geometric meaning
If an n × n real matrix A is written in terms of its column vectors A=[ a1|a2|⋯|an ]{displaystyle A={begin{bmatrix} {mathbf {a}}_{1}!!&|&!!{mathbf {a}}_{2}!!&|&!!cdots !!&|&!!{mathbf {a}}_{n} end{bmatrix}}}
- A(10⋮0)=a1,A(01⋮0)=a2,…,A(00⋮1)=an.{displaystyle A{begin{pmatrix}1\0\vdots \0end{pmatrix}}={mathbf {a}}_{1},quad A{begin{pmatrix}0\1\vdots \0end{pmatrix}}={mathbf {a}}_{2},quad ldots ,quad A{begin{pmatrix}0\0\vdots \1end{pmatrix}}={mathbf {a}}_{n}.}

This means that A{displaystyle A}


The determinant gives the signed n-dimensional volume of this parallelotope, det(A)=±vol(P){displaystyle det(A)=pm {text{vol}}(P)}
Definition
There are various equivalent ways to define the determinant of a square matrix A, i.e. one with the same number of rows and columns. Perhaps the simplest way to express the determinant is by considering the elements in the top row and the respective minors; starting at the left, multiply the element by the minor, then subtract the product of the next element and its minor, and alternate adding and subtracting such products until all elements in the top row have been exhausted. For example, here is the result for a 4 × 4 matrix:
- |abcdefghijklmnop|=a|fghjklnop|−b|eghiklmop|+c|efhijlmnp|−d|efgijkmno|.{displaystyle {begin{vmatrix}a&b&c&d\e&f&g&h\i&j&k&l\m&n&o&pend{vmatrix}}=a,{begin{vmatrix}f&g&h\j&k&l\n&o&pend{vmatrix}}-b,{begin{vmatrix}e&g&h\i&k&l\m&o&pend{vmatrix}}+c,{begin{vmatrix}e&f&h\i&j&l\m&n&pend{vmatrix}}-d,{begin{vmatrix}e&f&g\i&j&k\m&n&oend{vmatrix}}.}

Another way to define the determinant is expressed in terms of the columns of the matrix. If we write an n × n matrix A in terms of its column vectors
- A=[a1a2⋯an]{displaystyle A={begin{bmatrix}a_{1}&a_{2}&cdots &a_{n}end{bmatrix}}}

where the aj{displaystyle a_{j}}
- det[a1⋯baj+cv⋯an]=bdet(A)+cdet[a1⋯v⋯an]det[a1⋯ajaj+1⋯an]=−det[a1⋯aj+1aj⋯an]det(I)=1{displaystyle {begin{aligned}det {begin{bmatrix}a_{1}&cdots &ba_{j}+cv&cdots &a_{n}end{bmatrix}}&=bdet(A)+cdet {begin{bmatrix}a_{1}&cdots &v&cdots &a_{n}end{bmatrix}}\det {begin{bmatrix}a_{1}&cdots &a_{j}&a_{j+1}&cdots &a_{n}end{bmatrix}}&=-det {begin{bmatrix}a_{1}&cdots &a_{j+1}&a_{j}&cdots &a_{n}end{bmatrix}}\det(I)&=1end{aligned}}}

where b and c are scalars, v is any vector of size n and I is the identity matrix of size n. These equations say that the determinant is a linear function of each column, that interchanging adjacent columns reverses the sign of the determinant, and that the determinant of the identity matrix is 1. These properties mean that the determinant is an alternating multilinear function of the columns that maps the identity matrix to the underlying unit scalar. These suffice to uniquely calculate the determinant of any square matrix. Provided the underlying scalars form a field (more generally, a commutative ring with unity), the definition below shows that such a function exists, and it can be shown to be unique.[2]
Equivalently, the determinant can be expressed as a sum of products of entries of the matrix where each product has n terms and the coefficient of each product is −1 or 1 or 0 according to a given rule: it is a polynomial expression of the matrix entries. This expression grows rapidly with the size of the matrix (an n × n matrix contributes n! terms), so it will first be given explicitly for the case of 2 × 2 matrices and 3 × 3 matrices, followed by the rule for arbitrary size matrices, which subsumes these two cases.
Assume A is a square matrix with n rows and n columns, so that it can be written as
- A=[a1,1a1,2…a1,na2,1a2,2…a2,n⋮⋮⋱⋮an,1an,2…an,n].{displaystyle A={begin{bmatrix}a_{1,1}&a_{1,2}&dots &a_{1,n}\a_{2,1}&a_{2,2}&dots &a_{2,n}\vdots &vdots &ddots &vdots \a_{n,1}&a_{n,2}&dots &a_{n,n}end{bmatrix}}.}

The entries can be numbers or expressions (as happens when the determinant is used to define a characteristic polynomial); the definition of the determinant depends only on the fact that they can be added and multiplied together in a commutative manner.
The determinant of A is denoted by det(A), or it can be denoted directly in terms of the matrix entries by writing enclosing bars instead of brackets:
- |a1,1a1,2…a1,na2,1a2,2…a2,n⋮⋮⋱⋮an,1an,2…an,n|.{displaystyle {begin{vmatrix}a_{1,1}&a_{1,2}&dots &a_{1,n}\a_{2,1}&a_{2,2}&dots &a_{2,n}\vdots &vdots &ddots &vdots \a_{n,1}&a_{n,2}&dots &a_{n,n}end{vmatrix}}.}

2 × 2 matrices
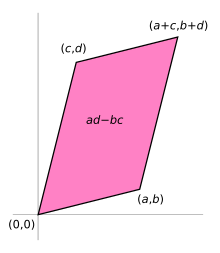
The area of the parallelogram is the absolute value of the determinant of the matrix formed by the vectors representing the parallelogram's sides.
The Leibniz formula for the determinant of a 2 × 2 matrix is
- |abcd|=ad−bc.{displaystyle {begin{vmatrix}a&b\c&dend{vmatrix}}=ad-bc.}

If the matrix entries are real numbers, the matrix A can be used to represent two linear maps: one that maps the standard basis vectors to the rows of A, and one that maps them to the columns of A. In either case, the images of the basis vectors form a parallelogram that represents the image of the unit square under the mapping. The parallelogram defined by the rows of the above matrix is the one with vertices at (0, 0), (a, b), (a + c, b + d), and (c, d), as shown in the accompanying diagram.
The absolute value of ad − bc is the area of the parallelogram, and thus represents the scale factor by which areas are transformed by A. (The parallelogram formed by the columns of A is in general a different parallelogram, but since the determinant is symmetric with respect to rows and columns, the area will be the same.)
The absolute value of the determinant together with the sign becomes the oriented area of the parallelogram. The oriented area is the same as the usual area, except that it is negative when the angle from the first to the second vector defining the parallelogram turns in a clockwise direction (which is opposite to the direction one would get for the identity matrix).
To show that ad − bc is the signed area, one may consider a matrix containing two vectors a = (a, b) and b = (c, d) representing the parallelogram's sides. The signed area can be expressed as |a||b|sinθ for the angle θ between the vectors, which is simply base times height, the length of one vector times the perpendicular component of the other. Due to the sine this already is the signed area, yet it may be expressed more conveniently using the cosine of the complementary angle to a perpendicular vector, e.g. a⊥ = (−b, a), such that |a⊥||b|cosθ' , which can be determined by the pattern of the scalar product to be equal to ad − bc:
- Signed area=|a||b|sinθ=|a⊥||b|cosθ′=(−ba)⋅(cd)=ad−bc.{displaystyle {text{Signed area}}=|{boldsymbol {a}}||{boldsymbol {b}}|sin theta =left|{boldsymbol {a}}^{perp }right||{boldsymbol {b}}|cos theta '={begin{pmatrix}-b\aend{pmatrix}}cdot {begin{pmatrix}c\dend{pmatrix}}=ad-bc.}

Thus the determinant gives the scaling factor and the orientation induced by the mapping represented by A. When the determinant is equal to one, the linear mapping defined by the matrix is equi-areal and orientation-preserving.
The object known as the bivector is related to these ideas. In 2D, it can be interpreted as an oriented plane segment formed by imagining two vectors each with origin (0, 0), and coordinates (a, b) and (c, d). The bivector magnitude (denoted by (a, b) ∧ (c, d)) is the signed area, which is also the determinant ad − bc.[3]
3 × 3 matrices
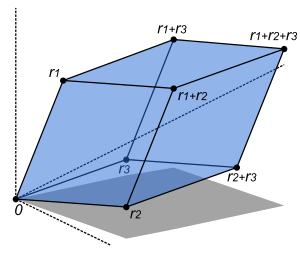
The volume of this parallelepiped is the absolute value of the determinant of the matrix formed by the rows constructed from the vectors r1, r2, and r3.
The Laplace formula for the determinant of a 3 × 3 matrix is
- |abcdefghi|=a|efhi|−b|dfgi|+c|degh|{displaystyle {begin{vmatrix}a&b&c\d&e&f\g&h&iend{vmatrix}}=a{begin{vmatrix}e&f\h&iend{vmatrix}}-b{begin{vmatrix}d&f\g&iend{vmatrix}}+c{begin{vmatrix}d&e\g&hend{vmatrix}}}

this can be expanded out to give
- |abcdefghi|=a(ei−fh)−b(di−fg)+c(dh−eg)=aei+bfg+cdh−ceg−bdi−afh.{displaystyle {begin{aligned}{begin{vmatrix}a&b&c\d&e&f\g&h&iend{vmatrix}}&=a(ei-fh)-b(di-fg)+c(dh-eg)\&=aei+bfg+cdh-ceg-bdi-afh.end{aligned}}}

which is the Leibniz formula for the determinant of a 3 × 3 matrix.

Sarrus' rule: The determinant of the three columns on the left is the sum of the products along the solid diagonals minus the sum of the products along the dashed diagonals
The rule of Sarrus is a mnemonic for the 3 × 3 matrix determinant: the sum of the products of three diagonal north-west to south-east lines of matrix elements, minus the sum of the products of three diagonal south-west to north-east lines of elements, when the copies of the first two columns of the matrix are written beside it as in the illustration. This scheme for calculating the determinant of a 3 × 3 matrix does not carry over into higher dimensions.
n × n matrices
The determinant of a matrix of arbitrary size can be defined by the Leibniz formula or the Laplace formula.
The Leibniz formula for the determinant of an n × n matrix A is
- det(A)=∑σ∈Sn(sgn(σ)∏i=1nai,σi).{displaystyle det(A)=sum _{sigma in S_{n}}left(operatorname {sgn}(sigma )prod _{i=1}^{n}a_{i,sigma _{i}}right).}

Here the sum is computed over all permutations σ of the set {1, 2, …, n}. A permutation is a function that reorders this set of integers. The value in the ith position after the reordering σ is denoted by σi. For example, for n = 3, the original sequence 1, 2, 3 might be reordered to σ = [2, 3, 1], with σ1 = 2, σ2 = 3, and σ3 = 1. The set of all such permutations (also known as the symmetric group on n elements) is denoted by Sn. For each permutation σ, sgn(σ) denotes the signature of σ, a value that is +1 whenever the reordering given by σ can be achieved by successively interchanging two entries an even number of times, and −1 whenever it can be achieved by an odd number of such interchanges.
In any of the n!{displaystyle n!}
- ∏i=1nai,σi{displaystyle prod _{i=1}^{n}a_{i,sigma _{i}}}

is notation for the product of the entries at positions (i, σi), where i ranges from 1 to n:
- a1,σ1⋅a2,σ2⋯an,σn.{displaystyle a_{1,sigma _{1}}cdot a_{2,sigma _{2}}cdots a_{n,sigma _{n}}.}

For example, the determinant of a 3 × 3 matrix A (n = 3) is
- ∑σ∈Snsgn(σ)∏i=1nai,σi=sgn([1,2,3])∏i=1nai,[1,2,3]i+sgn([1,3,2])∏i=1nai,[1,3,2]i+sgn([2,1,3])∏i=1nai,[2,1,3]i+sgn([2,3,1])∏i=1nai,[2,3,1]i+sgn([3,1,2])∏i=1nai,[3,1,2]i+sgn([3,2,1])∏i=1nai,[3,2,1]i=∏i=1nai,[1,2,3]i−∏i=1nai,[1,3,2]i−∏i=1nai,[2,1,3]i+∏i=1nai,[2,3,1]i+∏i=1nai,[3,1,2]i−∏i=1nai,[3,2,1]i=a1,1a2,2a3,3−a1,1a2,3a3,2−a1,2a2,1a3,3+a1,2a2,3a3,1+a1,3a2,1a3,2−a1,3a2,2a3,1.{displaystyle {begin{aligned}&sum _{sigma in S_{n}}operatorname {sgn}(sigma )prod _{i=1}^{n}a_{i,sigma _{i}}\={}&operatorname {sgn}([1,2,3])prod _{i=1}^{n}a_{i,[1,2,3]_{i}}+operatorname {sgn}([1,3,2])prod _{i=1}^{n}a_{i,[1,3,2]_{i}}+operatorname {sgn}([2,1,3])prod _{i=1}^{n}a_{i,[2,1,3]_{i}}+{}\&operatorname {sgn}([2,3,1])prod _{i=1}^{n}a_{i,[2,3,1]_{i}}+operatorname {sgn}([3,1,2])prod _{i=1}^{n}a_{i,[3,1,2]_{i}}+operatorname {sgn}([3,2,1])prod _{i=1}^{n}a_{i,[3,2,1]_{i}}\={}&prod _{i=1}^{n}a_{i,[1,2,3]_{i}}-prod _{i=1}^{n}a_{i,[1,3,2]_{i}}-prod _{i=1}^{n}a_{i,[2,1,3]_{i}}+prod _{i=1}^{n}a_{i,[2,3,1]_{i}}+prod _{i=1}^{n}a_{i,[3,1,2]_{i}}-prod _{i=1}^{n}a_{i,[3,2,1]_{i}}\[2pt]={}&a_{1,1}a_{2,2}a_{3,3}-a_{1,1}a_{2,3}a_{3,2}-a_{1,2}a_{2,1}a_{3,3}+a_{1,2}a_{2,3}a_{3,1}+a_{1,3}a_{2,1}a_{3,2}-a_{1,3}a_{2,2}a_{3,1}.end{aligned}}}
![{displaystyle {begin{aligned}&sum _{sigma in S_{n}}operatorname {sgn}(sigma )prod _{i=1}^{n}a_{i,sigma _{i}}\={}&operatorname {sgn}([1,2,3])prod _{i=1}^{n}a_{i,[1,2,3]_{i}}+operatorname {sgn}([1,3,2])prod _{i=1}^{n}a_{i,[1,3,2]_{i}}+operatorname {sgn}([2,1,3])prod _{i=1}^{n}a_{i,[2,1,3]_{i}}+{}\&operatorname {sgn}([2,3,1])prod _{i=1}^{n}a_{i,[2,3,1]_{i}}+operatorname {sgn}([3,1,2])prod _{i=1}^{n}a_{i,[3,1,2]_{i}}+operatorname {sgn}([3,2,1])prod _{i=1}^{n}a_{i,[3,2,1]_{i}}\={}&prod _{i=1}^{n}a_{i,[1,2,3]_{i}}-prod _{i=1}^{n}a_{i,[1,3,2]_{i}}-prod _{i=1}^{n}a_{i,[2,1,3]_{i}}+prod _{i=1}^{n}a_{i,[2,3,1]_{i}}+prod _{i=1}^{n}a_{i,[3,1,2]_{i}}-prod _{i=1}^{n}a_{i,[3,2,1]_{i}}\[2pt]={}&a_{1,1}a_{2,2}a_{3,3}-a_{1,1}a_{2,3}a_{3,2}-a_{1,2}a_{2,1}a_{3,3}+a_{1,2}a_{2,3}a_{3,1}+a_{1,3}a_{2,1}a_{3,2}-a_{1,3}a_{2,2}a_{3,1}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/858609ecf921b5e2e6bf6488ce1e47b1316dd5cb)
Levi-Civita symbol
It is sometimes useful to extend the Leibniz formula to a summation in which not only permutations, but all sequences of n indices in the range 1, …, n occur, ensuring that the contribution of a sequence will be zero unless it denotes a permutation. Thus the totally antisymmetric Levi-Civita symbol εi1,⋯,in{displaystyle varepsilon _{i_{1},cdots ,i_{n}}}




- det(A)=∑i1,i2,…,in=1nεi1⋯ina1,i1⋯an,in,{displaystyle det(A)=sum _{i_{1},i_{2},ldots ,i_{n}=1}^{n}varepsilon _{i_{1}cdots i_{n}}a_{1,i_{1}}cdots a_{n,i_{n}},}

or using two epsilon symbols as
- det(A)=1n!∑εi1⋯inεj1⋯jnai1j1⋯ainjn,{displaystyle det(A)={frac {1}{n!}}sum varepsilon _{i_{1}cdots i_{n}}varepsilon _{j_{1}cdots j_{n}}a_{i_{1}j_{1}}cdots a_{i_{n}j_{n}},}

where now each ir and each jr should be summed over 1, …, n.
However, through the use of tensor notation and the supression of the summation symbol (Einstein's summation convention) we can obtain a much more compact expression of the determinant of the second order system of n=3{displaystyle n=3}

- det(anm)erst=eijkariasjatk{displaystyle det(a_{n}^{m})e_{rst}=e_{ijk}a_{r}^{i}a_{s}^{j}a_{t}^{k}}

where erst{displaystyle e_{rst}}




Properties of the determinant
The determinant has many properties. Some basic properties of determinants are
det(In)=1{displaystyle det left(I_{n}right)=1}where In is the n × n identity matrix.
det(AT)=det(A),{displaystyle det left(A^{textsf {T}}right)=det(A),}where AT{displaystyle A^{textsf {T}}}
denotes the transpose of A{displaystyle A}
- det(A−1)=1det(A)=det(A)−1.{displaystyle det left(A^{-1}right)={frac {1}{det(A)}}=det(A)^{-1}.}
- For square matrices A and B of equal size,
- det(AB)=det(A)det(B).{displaystyle det(AB)=det(A)det(B).}
- det(AB)=det(A)det(B).{displaystyle det(AB)=det(A)det(B).}
det(cA)=cndet(A){displaystyle det(cA)=c^{n}det(A)}for an n × n matrix, A.
- For positive semidefinite matrices A, B, and C of equal size, det(A+B+C)+det(C)≥det(A+C)+det(B+C){displaystyle det(A+B+C)+det(C)geq det(A+C)+det(B+C)}
, for A,B,C≥0{displaystyle A,B,Cgeq 0}
with the corollary det(A+B)≥det(A)+det(B).{displaystyle det(A+B)geq det(A)+det(B).}
[5][6]
- If A is a triangular matrix, i.e. ai,j = 0 whenever i > j or, alternatively, whenever i < j, then its determinant equals the product of the diagonal entries:
- det(A)=a1,1a2,2⋯an,n=∏i=1nai,i.{displaystyle det(A)=a_{1,1}a_{2,2}cdots a_{n,n}=prod _{i=1}^{n}a_{i,i}.}
- det(A)=a1,1a2,2⋯an,n=∏i=1nai,i.{displaystyle det(A)=a_{1,1}a_{2,2}cdots a_{n,n}=prod _{i=1}^{n}a_{i,i}.}



This can be deduced from some of the properties below, but it follows most easily directly from the Leibniz formula (or from the Laplace expansion), in which the identity permutation is the only one that gives a non-zero contribution.
A number of additional properties relate to the effects on the determinant of changing particular rows or columns:
- Viewing an n×n{displaystyle ntimes n}
matrix as being composed of n{displaystyle n}
column of a matrix A{displaystyle A}
of two column vectors, and all other columns are left unchanged, then the determinant of A{displaystyle A}
(denoted Av{displaystyle A_{v}}
) and then by w{displaystyle mathbf {w} }
(denoted Aw{displaystyle A_{w}}
) (and a similar relation holds when writing a column as a scalar multiple of a column vector).
- det(A)=det([a1|…|aj|…|an])=det([…|v+w|…])=det([…|v|…])+det([…|w|…])=det(Av)+det(Aw){displaystyle {begin{aligned}det(A)&=det([mathbf {a} _{1}|dots |mathbf {a} _{j}|dots |mathbf {a} _{n}])\&=det([dots |mathbf {v} +mathbf {w} |dots ])\&=det([dots |mathbf {v} |dots ])+det([dots |mathbf {w} |dots ])\&=det left(A_{v}right)+det left(A_{w}right)end{aligned}}}
- det(A)=det([a1|…|aj|…|an])=det([…|v+w|…])=det([…|v|…])+det([…|w|…])=det(Av)+det(Aw){displaystyle {begin{aligned}det(A)&=det([mathbf {a} _{1}|dots |mathbf {a} _{j}|dots |mathbf {a} _{n}])\&=det([dots |mathbf {v} +mathbf {w} |dots ])\&=det([dots |mathbf {v} |dots ])+det([dots |mathbf {w} |dots ])\&=det left(A_{v}right)+det left(A_{w}right)end{aligned}}}
- If in a matrix, any row or column has all elements equal to zero, then the determinant of that matrix is 0.
- This n-linear function is an alternating form. This means that whenever two columns of a matrix are identical, or more generally some column can be expressed as a linear combination of the other columns (i.e. the columns of the matrix form a linearly dependent set), its determinant is 0.
![{displaystyle {begin{aligned}det(A)&=det([mathbf {a} _{1}|dots |mathbf {a} _{j}|dots |mathbf {a} _{n}])\&=det([dots |mathbf {v} +mathbf {w} |dots ])\&=det([dots |mathbf {v} |dots ])+det([dots |mathbf {w} |dots ])\&=det left(A_{v}right)+det left(A_{w}right)end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1ddccc0f585386e70c358bb5ff46e5ae9a301aad)
Properties 1, 8 and 10 — which all follow from the Leibniz formula — completely characterize the determinant; in other words the determinant is the unique function from n × n matrices to scalars that is n-linear alternating in the columns, and takes the value 1 for the identity matrix (this characterization holds even if scalars are taken in any given commutative ring). To see this it suffices to expand the determinant by multi-linearity in the columns into a (huge) linear combination of determinants of matrices in which each column is a standard basis vector. These determinants are either 0 (by property 9) or else ±1 (by properties 1 and 12 below), so the linear combination gives the expression above in terms of the Levi-Civita symbol. While less technical in appearance, this characterization cannot entirely replace the Leibniz formula in defining the determinant, since without it the existence of an appropriate function is not clear. For matrices over non-commutative rings, properties 8 and 9 are incompatible for n ≥ 2,[7] so there is no good definition of the determinant in this setting.
Property 2 above implies that properties for columns have their counterparts in terms of rows:
- Viewing an n × n matrix as being composed of n rows, the determinant is an n-linear function.
- This n-linear function is an alternating form: whenever two rows of a matrix are identical, its determinant is 0.
- Interchanging any pair of columns or rows of a matrix multiplies its determinant by −1. This follows from properties 8 and 10 (it is a general property of multilinear alternating maps). More generally, any permutation of the rows or columns multiplies the determinant by the sign of the permutation. By permutation, it is meant viewing each row as a vector Ri (equivalently each column as Ci) and reordering the rows (or columns) by interchange of Rj and Rk (or Cj and Ck), where j,k are two indices chosen from 1 to n for an n × n square matrix.
- Adding a scalar multiple of one column to another column does not change the value of the determinant. This is a consequence of properties 8 and 10 in the following way: by property 8 the determinant changes by a multiple of the determinant of a matrix with two equal columns, which determinant is 0 by property 10. Similarly, adding a scalar multiple of one row to another row leaves the determinant unchanged.
Property 5 says that the determinant on n × n matrices is homogeneous of degree n. These properties can be used to facilitate the computation of determinants by simplifying the matrix to the point where the determinant can be determined immediately. Specifically, for matrices with coefficients in a field, properties 13 and 14 can be used to transform any matrix into a triangular matrix, whose determinant is given by property 7; this is essentially the method of Gaussian elimination.
For example, the determinant of
- A=[−22−3−11320−1]{displaystyle A={begin{bmatrix}-2&2&-3\-1&1&3\2&0&-1end{bmatrix}}}

can be computed using the following matrices:
- B=[−22−3004.520−1],C=[−22−3004.502−4],D=[−22−302−4004.5].{displaystyle B={begin{bmatrix}-2&2&-3\0&0&4.5\2&0&-1end{bmatrix}},quad C={begin{bmatrix}-2&2&-3\0&0&4.5\0&2&-4end{bmatrix}},quad D={begin{bmatrix}-2&2&-3\0&2&-4\0&0&4.5end{bmatrix}}.}

Here, B is obtained from A by adding −1/2×the first row to the second, so that det(A) = det(B). C is obtained from B by adding the first to the third row, so that det(C) = det(B). Finally, D is obtained from C by exchanging the second and third row, so that det(D) = −det(C). The determinant of the (upper) triangular matrix D is the product of its entries on the main diagonal: (−2) · 2 · 4.5 = −18. Therefore, det(A) = −det(D) = +18.
Schur complement
The following identity holds for a Schur complement of a square matrix:
The Schur complement arises as the result of performing a block Gaussian elimination by multiplying the matrix M from the right with a block lower triangular matrix
- L=[Ip0−D−1CIq].{displaystyle L=left[{begin{matrix}I_{p}&0\-D^{-1}C&I_{q}end{matrix}}right].}
![{displaystyle L=left[{begin{matrix}I_{p}&0\-D^{-1}C&I_{q}end{matrix}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8d2de9f5f13686b885f8c4ebd9db596b6804fd5e)
Here Ip denotes a p×p identity matrix. After multiplication with the matrix L the Schur complement appears in the upper p×p block. The product matrix is
- ML=[ABCD][Ip0−D−1CIq]=[A−BD−1CB0D]=[IpBD−10Iq][A−BD−1C00D].{displaystyle {begin{aligned}ML&=left[{begin{matrix}A&B\C&Dend{matrix}}right]left[{begin{matrix}I_{p}&0\-D^{-1}C&I_{q}end{matrix}}right]=left[{begin{matrix}A-BD^{-1}C&B\0&Dend{matrix}}right]\&=left[{begin{matrix}I_{p}&BD^{-1}\0&I_{q}end{matrix}}right]left[{begin{matrix}A-BD^{-1}C&0\0&Dend{matrix}}right].end{aligned}}}
![{displaystyle {begin{aligned}ML&=left[{begin{matrix}A&B\C&Dend{matrix}}right]left[{begin{matrix}I_{p}&0\-D^{-1}C&I_{q}end{matrix}}right]=left[{begin{matrix}A-BD^{-1}C&B\0&Dend{matrix}}right]\&=left[{begin{matrix}I_{p}&BD^{-1}\0&I_{q}end{matrix}}right]left[{begin{matrix}A-BD^{-1}C&0\0&Dend{matrix}}right].end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/20f5aad0c7471f371ce077a41070037b5ec49c3e)
That is, we have effected a Gaussian decomposition
- [ABCD]=[IpBD−10Iq][A−BD−1C00D][Ip0D−1CIq],{displaystyle left[{begin{matrix}A&B\C&Dend{matrix}}right]=left[{begin{matrix}I_{p}&BD^{-1}\0&I_{q}end{matrix}}right]left[{begin{matrix}A-BD^{-1}C&0\0&Dend{matrix}}right]left[{begin{matrix}I_{p}&0\D^{-1}C&I_{q}end{matrix}}right],}
![{displaystyle left[{begin{matrix}A&B\C&Dend{matrix}}right]=left[{begin{matrix}I_{p}&BD^{-1}\0&I_{q}end{matrix}}right]left[{begin{matrix}A-BD^{-1}C&0\0&Dend{matrix}}right]left[{begin{matrix}I_{p}&0\D^{-1}C&I_{q}end{matrix}}right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/457fd6c381484606e40199291bc571aa5c10be14)
The first and last matrices on the RHS have determinant unity, so we have
- det|ABCD|=det|D|det|A−BD−1C|.{displaystyle {rm {det}}left|{begin{matrix}A&B\C&Dend{matrix}}right|={rm {det}}|D|,{rm {det}}left|A-BD^{-1}Cright|.}

This is Schur's determinant identity.
Multiplicativity and matrix groups
The determinant of a matrix product of square matrices equals the product of their determinants:
- det(AB)=det(A)det(B).{displaystyle det(AB)=det(A)det(B).}
Thus the determinant is a multiplicative map. This property is a consequence of the characterization given above of the determinant as the unique n-linear alternating function of the columns with value 1 on the identity matrix, since the function Mn(K) → K that maps M ↦ det(AM) can easily be seen to be n-linear and alternating in the columns of M, and takes the value det(A) at the identity. The formula can be generalized to (square) products of rectangular matrices, giving the Cauchy–Binet formula, which also provides an independent proof of the multiplicative property.
The determinant det(A) of a matrix A is non-zero if and only if A is invertible or, yet another equivalent statement, if its rank equals the size of the matrix. If so, the determinant of the inverse matrix is given by
- det(A−1)=1det(A).{displaystyle det left(A^{-1}right)={frac {1}{det(A)}}.}

In particular, products and inverses of matrices with determinant one still have this property. Thus, the set of such matrices (of fixed size n) form a group known as the special linear group. More generally, the word "special" indicates the subgroup of another matrix group of matrices of determinant one. Examples include the special orthogonal group (which if n is 2 or 3 consists of all rotation matrices), and the special unitary group.
Laplace's formula and the adjugate matrix
Laplace's formula expresses the determinant of a matrix in terms of its minors. The minor Mi,j is defined to be the determinant of the (n−1) × (n−1)-matrix that results from A by removing the i-th row and the j-th column. The expression (−1)i + jMi,j is known as a cofactor. The determinant of A is given by
det(A)=∑j=1n(−1)i+jai,jMi,j{displaystyle det(A)=sum _{j=1}^{n}(-1)^{i+j}a_{i,j}M_{i,j}}(for a fixed i{displaystyle i}
) =∑i=1n(−1)i+jai,jMi,j{displaystyle =sum _{i=1}^{n}(-1)^{i+j}a_{i,j}M_{i,j}}
(for a fixed j{displaystyle j}
)
Calculating det(A) by means of this formula is referred to as expanding the determinant along a row, the i-th row using the first form with fixed i, or expanding along a column, using the second form with fixed j. For example, the Laplace expansion of the 3 × 3 matrix
- A=[−22−3−11320−1],{displaystyle A={begin{bmatrix}-2&2&-3\-1&1&3\2&0&-1end{bmatrix}},}

along the second column (j = 2 and the sum runs over i) is given by,
det(A){displaystyle det(A)}  | ={displaystyle =}  | (−1)1+2⋅2⋅|−132−1|+(−1)2+2⋅1⋅|−2−32−1|+(−1)3+2⋅0⋅|−2−3−13|{displaystyle (-1)^{1+2}cdot 2cdot {begin{vmatrix}-1&3\2&-1end{vmatrix}}+(-1)^{2+2}cdot 1cdot {begin{vmatrix}-2&-3\2&-1end{vmatrix}}+(-1)^{3+2}cdot 0cdot {begin{vmatrix}-2&-3\-1&3end{vmatrix}}}  |
={displaystyle =} | (−2)⋅((−1)⋅(−1)−2⋅3)+1⋅((−2)⋅(−1)−2⋅(−3)){displaystyle (-2)cdot ((-1)cdot (-1)-2cdot 3)+1cdot ((-2)cdot (-1)-2cdot (-3))}  | |
={displaystyle =} | (−2)⋅(−5)+8=18.{displaystyle (-2)cdot (-5)+8=18.}  | |
However, Laplace expansion is efficient for small matrices only.
The adjugate matrix adj(A) is the transpose of the matrix consisting of the cofactors, i.e.,
- (adj(A))i,j=(−1)i+jMj,i.{displaystyle (operatorname {adj} (A))_{i,j}=(-1)^{i+j}M_{j,i}.}

In terms of the adjugate matrix, Laplace's expansion can be written as[8]
- (detA)I=AadjA=(adjA)A.{displaystyle (operatorname {det} A)I=A,operatorname {adj} A=(operatorname {adj} A),A.}

Sylvester's determinant theorem
Sylvester's determinant theorem states that for A, an m × n matrix, and B, an n × m matrix (so that A and B have dimensions allowing them to be multiplied in either order forming a square matrix):
det(Im+AB)=det(In+BA){displaystyle det left(I_{mathit {m}}+ABright)=det left(I_{mathit {n}}+BAright)},
where Im and In are the m × m and n × n identity matrices, respectively.
From this general result several consequences follow.
- For the case of column vector c and row vector r, each with m components, the formula allows quick calculation of the determinant of a matrix that differs from the identity matrix by a matrix of rank 1:
det(Im+cr)=1+rc{displaystyle det left(I_{mathit {m}}+crright)=1+rc}.
- More generally,[9] for any invertible m × m matrix X,
det(X+AB)=det(X)det(In+BX−1A){displaystyle det(X+AB)=det(X)det left(I_{mathit {n}}+BX^{-1}Aright)},
- For a column and row vector as above:
det(X+cr)=det(X)det(1+rX−1c)=det(X)+radj(X)c{displaystyle det(X+cr)=det(X)det left(1+rX^{-1}cright)=det(X)+r,operatorname {adj} (X),c}.
Properties of the determinant in relation to other notions
Relation to eigenvalues and trace
Let A be an arbitrary n×n matrix of complex numbers with eigenvalues λ1{displaystyle lambda _{1}}


det(A)=∏i=1nλi=λ1λ2⋯λn{displaystyle operatorname {det} (A)=prod _{i=1}^{n}lambda _{i}=lambda _{1}lambda _{2}cdots lambda _{n}}.
The product of all non-zero eigenvalues is referred to as pseudo-determinant.
Conversely, determinants can be used to find the eigenvalues of the matrix A: they are the solutions of the characteristic equation
- det(A−λI)=0 ,{displaystyle det(A-lambda I)=0~,}

where I is the identity matrix of the same dimension as A and λ is a (scalar) number which solves the equation (there are no more than n solutions, where n is the dimension of A).
A Hermitian matrix is positive definite if all its eigenvalues are positive. Sylvester's criterion asserts that this is equivalent to the determinants of the submatrices
- Ak:=[a1,1a1,2…a1,ka2,1a2,2…a2,k⋮⋮⋱⋮ak,1ak,2…ak,k]{displaystyle A_{k}:={begin{bmatrix}a_{1,1}&a_{1,2}&dots &a_{1,k}\a_{2,1}&a_{2,2}&dots &a_{2,k}\vdots &vdots &ddots &vdots \a_{k,1}&a_{k,2}&dots &a_{k,k}end{bmatrix}}}

being positive, for all k between 1 and n.
The trace tr(A) is by definition the sum of the diagonal entries of A and also equals the sum of the eigenvalues. Thus, for complex matrices A,
- det(exp(A))=exp(tr(A)){displaystyle det(exp(A))=exp(operatorname {tr} (A))}

or, for real matrices A,
- tr(A)=log(det(exp(A))).{displaystyle operatorname {tr} (A)=log(det(exp(A))).}

Here exp(A) denotes the matrix exponential of A, because every eigenvalue λ of A corresponds to the eigenvalue exp(λ) of exp(A). In particular, given any logarithm of A, that is, any matrix L satisfying
- exp(L)=A{displaystyle exp(L)=A}

the determinant of A is given by
- det(A)=exp(tr(L)).{displaystyle det(A)=exp(operatorname {tr} (L)).}

For example, for n = 2, n = 3, and n = 4, respectively,
- det(A)=12((tr(A))2−tr(A2)),det(A)=16((tr(A))3−3tr(A) tr(A2)+2tr(A3)),det(A)=124((tr(A))4−6tr(A2)(tr(A))2+3(tr(A2))2+8tr(A3) tr(A)−6tr(A4)).{displaystyle {begin{aligned}det(A)&={frac {1}{2}}left(left(operatorname {tr} (A)right)^{2}-operatorname {tr} left(A^{2}right)right),\det(A)&={frac {1}{6}}left(left(operatorname {tr} (A)right)^{3}-3operatorname {tr} (A)~operatorname {tr} left(A^{2}right)+2operatorname {tr} left(A^{3}right)right),\det(A)&={frac {1}{24}}left(left(operatorname {tr} (A)right)^{4}-6operatorname {tr} left(A^{2}right)left(operatorname {tr} (A)right)^{2}+3left(operatorname {tr} left(A^{2}right)right)^{2}+8operatorname {tr} left(A^{3}right)~operatorname {tr} (A)-6operatorname {tr} left(A^{4}right)right).end{aligned}}}

cf. Cayley-Hamilton theorem. Such expressions are deducible from combinatorial arguments, Newton's identities, or the Faddeev–LeVerrier algorithm. That is, for generic n, detA = (−)nc0 the signed constant term of the characteristic polynomial, determined recursively from
- cn=1; cn−m=−1m∑k=1mcn−m+ktr(Ak) (1≤m≤n) .{displaystyle c_{n}=1;~~~c_{n-m}=-{frac {1}{m}}sum _{k=1}^{m}c_{n-m+k}operatorname {tr} left(A^{k}right)~~(1leq mleq n)~.}

In the general case, this may also be obtained from[10]
- det(A)=∑k1,k2,…,kn∏l=1n(−1)kl+1lklkl!tr(Al)kl,{displaystyle det(A)=sum _{k_{1},k_{2},ldots ,k_{n}}prod _{l=1}^{n}{frac {(-1)^{k_{l}+1}}{l^{k_{l}}k_{l}!}}operatorname {tr} left(A^{l}right)^{k_{l}},}

where the sum is taken over the set of all integers kl ≥ 0 satisfying the equation
- ∑l=1nlkl=n.{displaystyle sum _{l=1}^{n}lk_{l}=n.}

The formula can be expressed in terms of the complete exponential Bell polynomial of n arguments sl = −(l – 1)! tr(Al) as
- det(A)=(−1)nn!Bn(s1,s2,…,sn).{displaystyle det(A)={frac {(-1)^{n}}{n!}}B_{n}(s_{1},s_{2},ldots ,s_{n}).}

This formula can also be used to find the determinant of a matrix AIJ with multidimensional indices I = (i1, i2, …, ir) and J = (j1, j2, …, jr). The product and trace of such matrices are defined in a natural way as
- (AB)JI=∑KAKIBJK,tr(A)=∑IAII.{displaystyle (AB)_{J}^{I}=sum _{K}A_{K}^{I}B_{J}^{K},operatorname {tr} (A)=sum _{I}A_{I}^{I}.}

An important arbitrary dimension n identity can be obtained from the Mercator series expansion of the logarithm when the expansion converges. If every eigenvalue of A is less than 1 in absolute value,
- det(I+A)=∑k=0∞1k!(−∑j=1∞(−1)jjtr(Aj))k,{displaystyle det(I+A)=sum _{k=0}^{infty }{frac {1}{k!}}left(-sum _{j=1}^{infty }{frac {(-1)^{j}}{j}}operatorname {tr} left(A^{j}right)right)^{k},,}

where I is the identity matrix. More generally, if
- ∑k=0∞1k!(−∑j=1∞(−1)jsjjtr(Aj))k,{displaystyle sum _{k=0}^{infty }{frac {1}{k!}}left(-sum _{j=1}^{infty }{frac {(-1)^{j}s^{j}}{j}}operatorname {tr} left(A^{j}right)right)^{k},,}

is expanded as a formal power series in s then all coefficients of sm for m > n are zero and the remaining polynomial is det(I + sA).
Upper and lower bounds
For a positive definite matrix A, the trace operator gives the following tight lower and upper bounds on the log determinant
- tr(I−A−1)≤logdet(A)≤tr(A−I){displaystyle operatorname {tr} left(I-A^{-1}right)leq log det(A)leq operatorname {tr} (A-I)}

with equality if and only if A=I. This relationship can be derived via the formula for the KL-divergence between two multivariate normal distributions.
Also,
- ntr(A−1)≤det(A)1n≤1ntr(A)≤1ntr(A2).{displaystyle {frac {n}{operatorname {tr} (A^{-1})}}leq det(A)^{frac {1}{n}}leq {frac {1}{n}}operatorname {tr} (A)leq {sqrt {{frac {1}{n}}operatorname {tr} left(A^{2}right)}}.}

These inequalities can be proved by bringing the matrix A to the diagonal form. As such, they represent the well-known fact that the harmonic mean is less than the geometric mean, which is less than the arithmetic mean, which is, in turn, less than the root mean square.
Cramer's rule
For a matrix equation
Ax=b{displaystyle Ax=b}, given that A has a nonzero determinant,
the solution is given by Cramer's rule:
- xi=det(Ai)det(A)i=1,2,3,…,n{displaystyle x_{i}={frac {det(A_{i})}{det(A)}}qquad i=1,2,3,ldots ,n}

where Ai is the matrix formed by replacing the ith column of A by the column vector b. This follows immediately by column expansion of the determinant, i.e.
- det(Ai)=det[a1,…,b,…,an]=∑j=1nxjdet[a1,…,ai−1,aj,ai+1,…,an]=xidet(A){displaystyle det(A_{i})=det {begin{bmatrix}a_{1},&ldots ,&b,&ldots ,&a_{n}end{bmatrix}}=sum _{j=1}^{n}x_{j}det {begin{bmatrix}a_{1},&ldots ,a_{i-1},&a_{j},&a_{i+1},&ldots ,&a_{n}end{bmatrix}}=x_{i}det(A)}

where the vectors aj{displaystyle a_{j}}
- Aadj(A)=adj(A)A=det(A)In.{displaystyle A,operatorname {adj} (A)=operatorname {adj} (A),A=det(A),I_{n}.}

It has recently been shown that Cramer's rule can be implemented in O(n3) time,[11] which is comparable to more common methods of solving systems of linear equations, such as LU, QR, or singular value decomposition.
Block matrices
Suppose A, B, C, and D are matrices of dimension n × n, n × m, m × n, and m × m, respectively. Then
- det(A0CD)=det(A)det(D)=det(AB0D).{displaystyle det {begin{pmatrix}A&0\C&Dend{pmatrix}}=det(A)det(D)=det {begin{pmatrix}A&B\0&Dend{pmatrix}}.}

This can be seen from the Leibniz formula, or from a decomposition like (for the former case)
- (A0CD)=(A0CIm)(In00D).{displaystyle {begin{pmatrix}A&0\C&Dend{pmatrix}}={begin{pmatrix}A&0\C&I_{m}end{pmatrix}}{begin{pmatrix}I_{n}&0\0&Dend{pmatrix}}.}

When A is invertible, one has
- det(ABCD)=det(A)det(D−CA−1B).{displaystyle det {begin{pmatrix}A&B\C&Dend{pmatrix}}=det(A)det left(D-CA^{-1}Bright).}

as can be seen by employing the decomposition
- (ABCD)=(A0CIm)(InA−1B0D−CA−1B).{displaystyle {begin{pmatrix}A&B\C&Dend{pmatrix}}={begin{pmatrix}A&0\C&I_{m}end{pmatrix}}{begin{pmatrix}I_{n}&A^{-1}B\0&D-CA^{-1}Bend{pmatrix}}.}

When D is invertible, a similar identity with det(D){displaystyle det(D)}
- det(ABCD)=det(D)det(A−BD−1C).{displaystyle det {begin{pmatrix}A&B\C&Dend{pmatrix}}=det(D)det left(A-BD^{-1}Cright).}

When the blocks are square matrices of the same order further formulas hold. For example, if C and D commute (i.e., CD = DC), then the following formula comparable to the determinant of a 2 × 2 matrix holds:[13]
- det(ABCD)=det(AD−BC).{displaystyle det {begin{pmatrix}A&B\C&Dend{pmatrix}}=det(AD-BC).}

Generally, if all pairs of n × n matrices of the np × np block matrix commute, then the determinant of the block matrix is equal to the determinant of the matrix obtained by computing the determinant of the block matrix considering its entries as the entries of a p × p matrix.[14] As the previous formula shows, for p = 2, this criterion is sufficient, but not necessary.
When A = D and B = C, the blocks are square matrices of the same order and the following formula holds (even if A and B do not commute)
- det(ABBA)=det(A−B)det(A+B).{displaystyle det {begin{pmatrix}A&B\B&Aend{pmatrix}}=det(A-B)det(A+B).}

When D is a 1×1 matrix, B is a column vector, and C is a row vector then
- det(ABCD)=(D−CA−1B)det(A).{displaystyle det {begin{pmatrix}A&B\C&Dend{pmatrix}}=left(D-CA^{-1}Bright)det(A),.}

Let s{displaystyle s}
- det(A−sIBCD−sI)=det(A−sI)det(D−Cadj(A−sI)Bdet(A−sI)−sI)ifs∉eig(A)=det(A−sI)1−n−mdet(det(A−sI)D−Cadj(A−sI)B−det(A−sI)sI){displaystyle {begin{aligned}det {begin{pmatrix}A-sI&B\C&D-sIend{pmatrix}}&=det(A-sI)det left(D-{frac {Coperatorname {adj} (A-sI)B}{det(A-sI)}}-sIright)quad mathrm {if} quad snotin operatorname {eig} (A)\&=det(A-sI)^{1-n-m}det left(det(A-sI)D-Coperatorname {adj} (A-sI)B-det(A-sI)sIright)end{aligned}}}

Derivative
It can be seen, e.g. using the Leibniz formula, that the determinant of real (or analogously for complex) square matrices is a polynomial function from Rn × n to R, and so it is everywhere differentiable. Its derivative can be expressed using Jacobi's formula:[15]
- ddet(A)dα=tr(adj(A)dAdα).{displaystyle {frac {ddet(A)}{dalpha }}=operatorname {tr} left(operatorname {adj} (A){frac {dA}{dalpha }}right).}

where adj(A) denotes the adjugate of A. In particular, if A is invertible, we have
- ddet(A)dα=det(A)tr(A−1dAdα).{displaystyle {frac {ddet(A)}{dalpha }}=det(A)operatorname {tr} left(A^{-1}{frac {dA}{dalpha }}right).}

Expressed in terms of the entries of A, these are
- ∂det(A)∂Aij=adj(A)ji=det(A)(A−1)ji.{displaystyle {frac {partial det(A)}{partial A_{ij}}}=operatorname {adj} (A)_{ji}=det(A)left(A^{-1}right)_{ji}.}

Yet another equivalent formulation is
det(A+ϵX)−det(A)=tr(adj(A)X)ϵ+O(ϵ2)=det(A)tr(A−1X)ϵ+O(ϵ2){displaystyle det(A+epsilon X)-det(A)=operatorname {tr} (operatorname {adj} (A)X)epsilon +Oleft(epsilon ^{2}right)=det(A)operatorname {tr} left(A^{-1}Xright)epsilon +Oleft(epsilon ^{2}right)},
using big O notation. The special case where A=I{displaystyle A=I}
- det(I+ϵX)=1+tr(X)ϵ+O(ϵ2).{displaystyle det(I+epsilon X)=1+operatorname {tr} (X)epsilon +Oleft(epsilon ^{2}right).}

This identity is used in describing the tangent space of certain matrix Lie groups.
If the matrix A is written as A=[abc]{displaystyle A={begin{bmatrix}mathbf {a} &mathbf {b} &mathbf {c} end{bmatrix}}}
- ∇adet(A)=b×c∇bdet(A)=c×a∇cdet(A)=a×b.{displaystyle {begin{aligned}nabla _{mathbf {a} }det(A)&=mathbf {b} times mathbf {c} \nabla _{mathbf {b} }det(A)&=mathbf {c} times mathbf {a} \nabla _{mathbf {c} }det(A)&=mathbf {a} times mathbf {b} .end{aligned}}}

Abstract algebraic aspects
Determinant of an endomorphism
The above identities concerning the determinant of products and inverses of matrices imply that similar matrices have the same determinant: two matrices A and B are similar, if there exists an invertible matrix X such that A = X−1BX. Indeed, repeatedly applying the above identities yields
- det(A)=det(X)−1det(B)det(X)=det(B)det(X)−1det(X)=det(B).{displaystyle det(A)=det(X)^{-1}det(B)det(X)=det(B)det(X)^{-1}det(X)=det(B).}

The determinant is therefore also called a similarity invariant. The determinant of a linear transformation
- T:V→V{displaystyle T:Vrightarrow V}

for some finite-dimensional vector space V is defined to be the determinant of the matrix describing it, with respect to an arbitrary choice of basis in V. By the similarity invariance, this determinant is independent of the choice of the basis for V and therefore only depends on the endomorphism T.
Exterior algebra
The determinant of a linear transformation A : V → V of an n-dimensional vector space V can be formulated in a coordinate-free manner by considering the nth exterior power ΛnV of V. A induces a linear map
- ΛnA:ΛnV→ΛnVv1∧v2∧⋯∧vn↦Av1∧Av2∧⋯∧Avn.{displaystyle {begin{aligned}Lambda ^{n}A:Lambda ^{n}V&rightarrow Lambda ^{n}V\v_{1}wedge v_{2}wedge dots wedge v_{n}&mapsto Av_{1}wedge Av_{2}wedge dots wedge Av_{n}.end{aligned}}}

As ΛnV is one-dimensional, the map ΛnA is given by multiplying with some scalar. This scalar coincides with the determinant of A, that is to say
- (ΛnA)(v1∧⋯∧vn)=det(A)⋅v1∧⋯∧vn.{displaystyle left(Lambda ^{n}Aright)left(v_{1}wedge dots wedge v_{n}right)=det(A)cdot v_{1}wedge dots wedge v_{n}.}

This definition agrees with the more concrete coordinate-dependent definition. This follows from the characterization of the determinant given above. For example, switching two columns changes the sign of the determinant; likewise, permuting the vectors in the exterior product v1 ∧ v2 ∧ v3 ∧ … ∧ vn to v2 ∧ v1 ∧ v3 ∧ … ∧ vn, say, also changes its sign.
For this reason, the highest non-zero exterior power Λn(V) is sometimes also called the determinant of V and similarly for more involved objects such as vector bundles or chain complexes of vector spaces. Minors of a matrix can also be cast in this setting, by considering lower alternating forms ΛkV with k < n.
Transformation on alternating multilinear n-forms
The vector space W of all alternating multilinear n-forms on an n-dimensional vector space V has dimension one. To each linear transformation T on V we associate a linear transformation T′ on W, where for each w in W we define (T′w)(x1, …, xn) = w(Tx1, …, Txn). As a linear transformation on a one-dimensional space, T′ is equivalent to a scalar multiple. We call this scalar the determinant of T.
Square matrices over commutative rings and abstract properties
The determinant can also be characterized as the unique function
- D:Mn(K)→K{displaystyle D:M_{n}(K)to K}

from the set of all n × n matrices with entries in a field K to this field satisfying the following three properties: first, D is an n-linear function: considering all but one column of A fixed, the determinant is linear in the remaining column, that is
- D(v1,…,vi−1,avi+bw,vi+1,…,vn)=aD(v1,…,vi−1,vi,vi+1,…,vn)+bD(v1,…,vi−1,w,vi+1,…,vn){displaystyle D(v_{1},dots ,v_{i-1},av_{i}+bw,v_{i+1},dots ,v_{n})=aD(v_{1},dots ,v_{i-1},v_{i},v_{i+1},dots ,v_{n})+bD(v_{1},dots ,v_{i-1},w,v_{i+1},dots ,v_{n})}

for any column vectors v1, ..., vn, and w and any scalars (elements of K) a and b. Second, D is an alternating function: for any matrix A with two identical columns, D(A) = 0. Finally, D(In) = 1, where In is the identity matrix.
This fact also implies that every other n-linear alternating function F: Mn(K) → K satisfies
- F(M)=F(I)D(M).{displaystyle F(M)=F(I)D(M).}

This definition can also be extended where K is a commutative ring R, in which case a matrix is invertible if and only if its determinant is an invertible element in R. For example, a matrix A with entries in Z, the integers, is invertible (in the sense that there exists an inverse matrix with integer entries) if the determinant is +1 or −1. Such a matrix is called unimodular.
The determinant defines a mapping
- GLn(R)→R×,{displaystyle operatorname {GL} _{n}(R)rightarrow R^{times },}

between the group of invertible n × n matrices with entries in R and the multiplicative group of units in R. Since it respects the multiplication in both groups, this map is a group homomorphism. Secondly, given a ring homomorphism f: R → S, there is a map GLn(f): GLn(R) → GLn(S) given by replacing all entries in R by their images under f. The determinant respects these maps, i.e., given a matrix A = (ai,j) with entries in R, the identity
- f(det((ai,j)))=det((f(ai,j))){displaystyle f(det((a_{i,j})))=det((f(a_{i,j})))}

holds. In other words, the following diagram commutes:

For example, the determinant of the complex conjugate of a complex matrix (which is also the determinant of its conjugate transpose) is the complex conjugate of its determinant, and for integer matrices: the reduction modulo m of the determinant of such a matrix is equal to the determinant of the matrix reduced modulo m (the latter determinant being computed using modular arithmetic). In the language of category theory, the determinant is a natural transformation between the two functors GLn and (⋅)× (see also Natural transformation#Determinant).[16] Adding yet another layer of abstraction, this is captured by saying that the determinant is a morphism of algebraic groups, from the general linear group to the multiplicative group,
- det:GLn→Gm.{displaystyle det :operatorname {GL} _{n}rightarrow mathbb {G} _{m}.}

Infinite matrices
For matrices with an infinite number of rows and columns, the above definitions of the determinant do not carry over directly. For example, in the Leibniz formula, an infinite sum (all of whose terms are infinite products) would have to be calculated. Functional analysis provides different extensions of the determinant for such infinite-dimensional situations, which however only work for particular kinds of operators.
The Fredholm determinant defines the determinant for operators known as trace class operators by an appropriate generalization of the formula
- det(I+A)=exp(tr(log(I+A))).{displaystyle det(I+A)=exp(operatorname {tr} (log(I+A))).}

Another infinite-dimensional notion of determinant is the functional determinant.
Operators in von Neumann algebras
For operators in a finite factor, one may define a positive real-valued determinant called the Fuglede−Kadison determinant using the canonical trace. In fact, corresponding to every tracial state on a von Neumann algebra there is a notion of Fuglede−Kadison determinant.
Related notions for non-commutative rings
For square matrices with entries in a non-commutative ring, there are various difficulties in defining determinants analogously to that for commutative rings. A meaning can be given to the Leibniz formula provided that the order for the product is specified, and similarly for other ways to define the determinant, but non-commutativity then leads to the loss of many fundamental properties of the determinant, for instance the multiplicative property or the fact that the determinant is unchanged under transposition of the matrix. Over non-commutative rings, there is no reasonable notion of a multilinear form (existence of a nonzero bilinear form[clarify] with a regular element of R as value on some pair of arguments implies that R is commutative). Nevertheless, various notions of non-commutative determinant have been formulated, which preserve some of the properties of determinants, notably quasideterminants and the Dieudonné determinant. It may be noted that if one considers certain specific classes of matrices with non-commutative elements, then there are examples where one can define the determinant and prove linear algebra theorems that are very similar to their commutative analogs. Examples include quantum groups and q-determinant, Capelli matrix and Capelli determinant, super-matrices and Berezinian; Manin matrices is the class of matrices which is most close to matrices with commutative elements.
Further variants
Determinants of matrices in superrings (that is, Z2-graded rings) are known as Berezinians or superdeterminants.[17]
The permanent of a matrix is defined as the determinant, except that the factors sgn(σ) occurring in Leibniz's rule are omitted. The immanant generalizes both by introducing a character of the symmetric group Sn in Leibniz's rule.
Calculation
Determinants are mainly used as a theoretical tool. They are rarely calculated explicitly in numerical linear algebra, where for applications like checking invertibility and finding eigenvalues the determinant has largely been supplanted by other techniques.[18]Computational geometry, however, does frequently use calculations related to determinants.[19]
Naive methods of implementing an algorithm to compute the determinant include using the Leibniz formula or Laplace's formula. Both these approaches are extremely inefficient for large matrices, though, since the number of required operations grows very quickly: it is of order n! (n factorial) for an n × n matrix M. For example, Leibniz's formula requires calculating n! products. Therefore, more involved techniques have been developed for calculating determinants.
Decomposition methods
Given a matrix A, some methods compute its determinant by writing A as a product of matrices whose determinants can be more easily computed. Such techniques are referred to as decomposition methods. Examples include the LU decomposition, the QR decomposition or the Cholesky decomposition (for positive definite matrices). These methods are of order O(n3), which is a significant improvement over O(n!)
The LU decomposition expresses A in terms of a lower triangular matrix L, an upper triangular matrix U and a permutation matrix P:
- A=PLU.{displaystyle A=PLU.}

The determinants of L and U can be quickly calculated, since they are the products of the respective diagonal entries. The determinant of P is just the sign ε{displaystyle varepsilon }
- det(A)=εdet(L)⋅det(U).{displaystyle det(A)=varepsilon det(L)cdot det(U).}

(See determinant identities.) Moreover, the decomposition can be chosen such that L is a unitriangular matrix and therefore has determinant 1, in which case the formula further simplifies to
- det(A)=εdet(U).{displaystyle det(A)=varepsilon det(U).}

Further methods
If the determinant of A and the inverse of A have already been computed, the matrix determinant lemma allows rapid calculation of the determinant of A + uvT, where u and v are column vectors.
Since the definition of the determinant does not need divisions, a question arises: do fast algorithms exist that do not need divisions? This is especially interesting for matrices over rings. Indeed, algorithms with run-time proportional to n4 exist. An algorithm of Mahajan and Vinay, and Berkowitz[20] is based on closed ordered walks (short clow). It computes more products than the determinant definition requires, but some of these products cancel and the sum of these products can be computed more efficiently. The final algorithm looks very much like an iterated product of triangular matrices.
If two matrices of order n can be multiplied in time M(n), where M(n) ≥ na for some a > 2, then the determinant can be computed in time O(M(n)).[21] This means, for example, that an O(n2.376) algorithm exists based on the Coppersmith–Winograd algorithm.
Charles Dodgson (i.e. Lewis Carroll of Alice's Adventures in Wonderland fame) invented a method for computing determinants called Dodgson condensation. Unfortunately this interesting method does not always work in its original form.
Algorithms can also be assessed according to their bit complexity, i.e., how many bits of accuracy are needed to store intermediate values occurring in the computation. For example, the Gaussian elimination (or LU decomposition) method is of order O(n3), but the bit length of intermediate values can become exponentially long.[22] The Bareiss Algorithm, on the other hand, is an exact-division method based on Sylvester's identity is also of order n3, but the bit complexity is roughly the bit size of the original entries in the matrix times n.[23]
History
Historically, determinants were used long before matrices: originally, a determinant was defined as a property of a system of linear equations.
The determinant "determines" whether the system has a unique solution (which occurs precisely if the determinant is non-zero).
In this sense, determinants were first used in the Chinese mathematics textbook The Nine Chapters on the Mathematical Art (九章算術, Chinese scholars, around the 3rd century BCE).
In Europe, 2 × 2 determinants were considered by Cardano at the end of the 16th century and larger ones by Leibniz.[24][25][26][27]
In Japan, Seki Takakazu (関 孝和) is credited with the discovery of the resultant and the determinant (at first in 1683, the complete version no later than 1710).
In Europe, Cramer (1750) added to the theory, treating the subject in relation to sets of equations.
The recurrence law was first announced by Bézout (1764).
It was Vandermonde (1771) who first recognized determinants as independent functions.[24]Laplace (1772)[28][29] gave the general method of expanding a determinant in terms of its complementary minors: Vandermonde had already given a special case. Immediately following, Lagrange (1773) treated determinants of the second and third order and applied it to questions of elimination theory; he proved many special cases of general identities.
Gauss (1801) made the next advance. Like Lagrange, he made much use of determinants in the theory of numbers. He introduced the word determinant (Laplace had used resultant), though not in the present signification, but rather as applied to the discriminant of a quantic. Gauss also arrived at the notion of reciprocal (inverse) determinants, and came very near the multiplication theorem.
The next contributor of importance is Binet (1811, 1812), who formally stated the theorem relating to the product of two matrices of m columns and n rows, which for the special case of m = n reduces to the multiplication theorem. On the same day (November 30, 1812) that Binet presented his paper to the Academy, Cauchy also presented one on the subject. (See Cauchy–Binet formula.) In this he used the word determinant in its present sense,[30][31] summarized and simplified what was then known on the subject, improved the notation, and gave the multiplication theorem with a proof more satisfactory than Binet's.[24][32] With him begins the theory in its generality.
The next important figure was Jacobi[25] (from 1827). He early used the functional determinant which Sylvester later called the Jacobian, and in his memoirs in Crelle's Journal for 1841 he specially treats this subject, as well as the class of alternating functions which Sylvester has called alternants. About the time of Jacobi's last memoirs, Sylvester (1839) and Cayley began their work.[33][34]
The study of special forms of determinants has been the natural result of the completion of the general theory. Axisymmetric determinants have been studied by Lebesgue, Hesse, and Sylvester; persymmetric determinants by Sylvester and Hankel; circulants by Catalan, Spottiswoode, Glaisher, and Scott; skew determinants and Pfaffians, in connection with the theory of orthogonal transformation, by Cayley; continuants by Sylvester; Wronskians (so called by Muir) by Christoffel and Frobenius; compound determinants by Sylvester, Reiss, and Picquet; Jacobians and Hessians by Sylvester; and symmetric gauche determinants by Trudi. Of the textbooks on the subject Spottiswoode's was the first. In America, Hanus (1886), Weld (1893), and Muir/Metzler (1933) published treatises.
Applications
Linear independence
As mentioned above, the determinant of a matrix (with real or complex entries, say) is zero if and only if the column vectors (or the row vectors) of the matrix are linearly dependent. Thus, determinants can be used to characterize linearly dependent vectors. For example, given two linearly independent vectors v1, v2 in R3, a third vector v3 lies in the plane spanned by the former two vectors exactly if the determinant of the 3 × 3 matrix consisting of the three vectors is zero. The same idea is also used in the theory of differential equations: given n functions f1(x), …, fn(x) (supposed to be n − 1 times differentiable), the Wronskian is defined to be
- W(f1,…,fn)(x)=|f1(x)f2(x)⋯fn(x)f1′(x)f2′(x)⋯fn′(x)⋮⋮⋱⋮f1(n−1)(x)f2(n−1)(x)⋯fn(n−1)(x)|.{displaystyle W(f_{1},ldots ,f_{n})(x)={begin{vmatrix}f_{1}(x)&f_{2}(x)&cdots &f_{n}(x)\f_{1}'(x)&f_{2}'(x)&cdots &f_{n}'(x)\vdots &vdots &ddots &vdots \f_{1}^{(n-1)}(x)&f_{2}^{(n-1)}(x)&cdots &f_{n}^{(n-1)}(x)end{vmatrix}}.}

It is non-zero (for some x) in a specified interval if and only if the given functions and all their derivatives up to order n−1 are linearly independent. If it can be shown that the Wronskian is zero everywhere on an interval then, in the case of analytic functions, this implies the given functions are linearly dependent. See the Wronskian and linear independence.
Orientation of a basis
The determinant can be thought of as assigning a number to every sequence of n vectors in Rn, by using the square matrix whose columns are the given vectors. For instance, an orthogonal matrix with entries in Rn represents an orthonormal basis in Euclidean space. The determinant of such a matrix determines whether the orientation of the basis is consistent with or opposite to the orientation of the standard basis. If the determinant is +1, the basis has the same orientation. If it is −1, the basis has the opposite orientation.
More generally, if the determinant of A is positive, A represents an orientation-preserving linear transformation (if A is an orthogonal 2 × 2 or 3 × 3 matrix, this is a rotation), while if it is negative, A switches the orientation of the basis.
Volume and Jacobian determinant
As pointed out above, the absolute value of the determinant of real vectors is equal to the volume of the parallelepiped spanned by those vectors. As a consequence, if f : Rn → Rn is the linear map represented by the matrix A, and S is any measurable subset of Rn, then the volume of f(S) is given by |det(A)| times the volume of S. More generally, if the linear map f : Rn → Rm is represented by the m × n matrix A, then the n-dimensional volume of f(S) is given by:
- volume(f(S))=det(ATA)×volume(S).{displaystyle operatorname {volume} (f(S))={sqrt {det left(A^{textsf {T}}Aright)}}times operatorname {volume} (S).}

By calculating the volume of the tetrahedron bounded by four points, they can be used to identify skew lines. The volume of any tetrahedron, given its vertices a, b, c, and d, is (1/6)·|det(a − b, b − c, c − d)|, or any other combination of pairs of vertices that would form a spanning tree over the vertices.
For a general differentiable function, much of the above carries over by considering the Jacobian matrix of f. For
- f:Rn→Rn,{displaystyle f:mathbf {R} ^{n}rightarrow mathbf {R} ^{n},}

the Jacobian matrix is the n × n matrix whose entries are given by
- D(f)=(∂fi∂xj)1≤i,j≤n.{displaystyle D(f)=left({frac {partial f_{i}}{partial x_{j}}}right)_{1leq i,jleq n}.}

Its determinant, the Jacobian determinant, appears in the higher-dimensional version of integration by substitution: for suitable functions f and an open subset U of Rn (the domain of f), the integral over f(U) of some other function φ : Rn → Rm is given by
- ∫f(U)ϕ(v)dv=∫Uϕ(f(u))|det(Df)(u)|du.{displaystyle int _{f(U)}phi (mathbf {v} ),dmathbf {v} =int _{U}phi (f(mathbf {u} ))left|det(operatorname {D} f)(mathbf {u} )right|,dmathbf {u} .}

The Jacobian also occurs in the inverse function theorem.
Vandermonde determinant (alternant)
The third order Vandermonde determinant is
- |111x1x2x3x12x22x32|=(x3−x2)(x3−x1)(x2−x1).{displaystyle left|{begin{array}{ccc}1&1&1\x_{1}&x_{2}&x_{3}\x_{1}^{2}&x_{2}^{2}&x_{3}^{2}end{array}}right|=(x_{3}-x_{2})(x_{3}-x_{1})(x_{2}-x_{1}).}

In general, the nth-order Vandermonde determinant is[35]
- |111⋯1x1x2x3⋯xnx12x22x32⋯xn2⋮⋮⋮⋱⋮x1n−1x2n−1x3n−1⋯xnn−1|=∏1≤i<j≤n(xj−xi),{displaystyle left|{begin{array}{ccccc}1&1&1&cdots &1\x_{1}&x_{2}&x_{3}&cdots &x_{n}\x_{1}^{2}&x_{2}^{2}&x_{3}^{2}&cdots &x_{n}^{2}\vdots &vdots &vdots &ddots &vdots \x_{1}^{n-1}&x_{2}^{n-1}&x_{3}^{n-1}&cdots &x_{n}^{n-1}end{array}}right|=prod _{1leq i<jleq n}left(x_{j}-x_{i}right),}

where the right-hand side is the continued product of all the differences that can be formed from the n(n−1)/2 pairs of numbers taken from x1, x2, …, xn, with the order of the differences taken in the reversed order of the suffixes that are involved.
Circulants
Second order
- |x1x2x2x1|=(x1+x2)(x1−x2).{displaystyle left|{begin{array}{cc}x_{1}&x_{2}\x_{2}&x_{1}end{array}}right|=left(x_{1}+x_{2}right)left(x_{1}-x_{2}right).}

Third order
- |x1x2x3x3x1x2x2x3x1|=(x1+x2+x3)(x1+ωx2+ω2x3)(x1+ω2x2+ωx3),{displaystyle left|{begin{array}{ccc}x_{1}&x_{2}&x_{3}\x_{3}&x_{1}&x_{2}\x_{2}&x_{3}&x_{1}end{array}}right|=left(x_{1}+x_{2}+x_{3}right)left(x_{1}+omega x_{2}+omega ^{2}x_{3}right)left(x_{1}+omega ^{2}x_{2}+omega x_{3}right),}

where ω and ω2 are the complex cube roots of 1. In general, the nth-order circulant determinant is[35]
- |x1x2x3⋯xnxnx1x2⋯xn−1xn−1xnx1⋯xn−2⋮⋮⋮⋱⋮x2x3x4⋯x1|=∏j=1n(x1+x2ωj+x3ωj2+⋯+xnωjn−1),{displaystyle left|{begin{array}{ccccc}x_{1}&x_{2}&x_{3}&cdots &x_{n}\x_{n}&x_{1}&x_{2}&cdots &x_{n-1}\x_{n-1}&x_{n}&x_{1}&cdots &x_{n-2}\vdots &vdots &vdots &ddots &vdots \x_{2}&x_{3}&x_{4}&cdots &x_{1}end{array}}right|=prod _{j=1}^{n}left(x_{1}+x_{2}omega _{j}+x_{3}omega _{j}^{2}+cdots +x_{n}omega _{j}^{n-1}right),}

where ωj is an nth root of 1.
See also
- Cauchy determinant
- Dieudonné determinant
- Determinant identities
- Functional determinant
- Immanant
- Matrix determinant lemma
- Permanent
- Slater determinant
Notes
^ "Determinants and Volumes". textbooks.math.gatech.edu. Retrieved 16 March 2018..mw-parser-output cite.citation{font-style:inherit}.mw-parser-output .citation q{quotes:"""""""'""'"}.mw-parser-output .citation .cs1-lock-free a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/6/65/Lock-green.svg/9px-Lock-green.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .citation .cs1-lock-limited a,.mw-parser-output .citation .cs1-lock-registration a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/d/d6/Lock-gray-alt-2.svg/9px-Lock-gray-alt-2.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .citation .cs1-lock-subscription a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/a/aa/Lock-red-alt-2.svg/9px-Lock-red-alt-2.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration{color:#555}.mw-parser-output .cs1-subscription span,.mw-parser-output .cs1-registration span{border-bottom:1px dotted;cursor:help}.mw-parser-output .cs1-ws-icon a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/4/4c/Wikisource-logo.svg/12px-Wikisource-logo.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output code.cs1-code{color:inherit;background:inherit;border:inherit;padding:inherit}.mw-parser-output .cs1-hidden-error{display:none;font-size:100%}.mw-parser-output .cs1-visible-error{font-size:100%}.mw-parser-output .cs1-maint{display:none;color:#33aa33;margin-left:0.3em}.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration,.mw-parser-output .cs1-format{font-size:95%}.mw-parser-output .cs1-kern-left,.mw-parser-output .cs1-kern-wl-left{padding-left:0.2em}.mw-parser-output .cs1-kern-right,.mw-parser-output .cs1-kern-wl-right{padding-right:0.2em}
^ Serge Lang, Linear Algebra, 2nd Edition, Addison-Wesley, 1971, pp 173, 191.
^ WildLinAlg episode 4, Norman J Wildberger, Univ. of New South Wales, 2010, lecture via youtube
^ McConnell (1957). Applications of Tensor Analysis. Dover Publications. pp. 10–17.
^ Lin, Minghua; Sra, Suvrit (2014). "Completely strong superadditivity of generalized matrix functions". arXiv:1410.1958 [math.FA].
^ Paksoy; Turkmen; Zhang (4-1-2014). "Inequalities of Generalized Matrix Functions via Tensor Products". Electronic Journal of Linear Algebra. 27. doi:10.13001/1081-3810.1622. Check date values in:|date=(help)
^ In a non-commutative setting left-linearity (compatibility with left-multiplication by scalars) should be distinguished from right-linearity. Assuming linearity in the columns is taken to be left-linearity, one would have, for non-commuting scalars a, b:
- ab=ab|1001|=a|100b|=|a00b|=b|a001|=ba|1001|=ba,{displaystyle ab=ableft|{begin{matrix}1&0\0&1end{matrix}}right|=aleft|{begin{matrix}1&0\0&bend{matrix}}right|=left|{begin{matrix}a&0\0&bend{matrix}}right|=bleft|{begin{matrix}a&0\0&1end{matrix}}right|=baleft|{begin{matrix}1&0\0&1end{matrix}}right|=ba,}
a contradiction. There is no useful notion of multi-linear functions over a non-commutative ring.
- ab=ab|1001|=a|100b|=|a00b|=b|a001|=ba|1001|=ba,{displaystyle ab=ableft|{begin{matrix}1&0\0&1end{matrix}}right|=aleft|{begin{matrix}1&0\0&bend{matrix}}right|=left|{begin{matrix}a&0\0&bend{matrix}}right|=bleft|{begin{matrix}a&0\0&1end{matrix}}right|=baleft|{begin{matrix}1&0\0&1end{matrix}}right|=ba,}
^ § 0.8.2 of R. A. Horn & C. R. Johnson: Matrix Analysis 2nd ed. (2013) Cambridge University Press.
ISBN 978-0-521-54823-6.
^ Proofs can be found in http://www.ee.ic.ac.uk/hp/staff/dmb/matrix/proof003.html
^ A proof can be found in the Appendix B of Kondratyuk, L. A.; Krivoruchenko, M. I. (1992). "Superconducting quark matter in SU(2) color group". Zeitschrift für Physik A. 344: 99–115. Bibcode:1992ZPhyA.344...99K. doi:10.1007/BF01291027.
^ Habgood, Ken; Arel, Itamar (2012). "A condensation-based application of Cramerʼs rule for solving large-scale linear systems". Journal of Discrete Algorithms. 10: 98–109. doi:10.1016/j.jda.2011.06.007.
^ These identities were taken from http://www.ee.ic.ac.uk/hp/staff/dmb/matrix/proof003.html
^ Proofs are given in Silvester, J. R. (2000). "Determinants of Block Matrices" (PDF). Math. Gazette. 84: 460–467. JSTOR 3620776.
^ Sothanaphan, Nat (January 2017). "Determinants of block matrices with noncommuting blocks". Linear Algebra and its Applications. 512: 202–218. doi:10.1016/j.laa.2016.10.004.
^ § 0.8.10 of R. A. Horn & C. R. Johnson: Matrix Analysis 2nd ed. (2013) Cambridge University Press.
ISBN 978-0-521-54823-6.
^ Mac Lane, Saunders (1998), Categories for the Working Mathematician, Graduate Texts in Mathematics 5 ((2nd ed.) ed.), Springer-Verlag, ISBN 0-387-98403-8
^ Varadarajan, V. S (2004), Supersymmetry for mathematicians: An introduction, ISBN 978-0-8218-3574-6.
^ L. N. Trefethen and D. Bau, Numerical Linear Algebra (SIAM, 1997). e.g. in Lecture 1: "... we mention that the determinant, though a convenient notion theoretically, rarely finds a useful role in numerical algorithms."
^
A survey of state-of-the-art algorithms for computing determinants and their advantages and disadvantages including results of performance tests, is included in
Fisikopoulos, Vissarion; Peñaranda, Luis (2016). "Faster geometric algorithms via dynamic determinant computation" (PDF). Computational Geometry. Elsevier B. V. 54: 1–16. arXiv:1206.7067. doi:10.1016/j.comgeo.2015.12.001. ISSN 0925-7721.
The survey is section 1.1 Previous work, and the results of tests are in section 4.3 Determinant computation experiments.
^ http://page.inf.fu-berlin.de/~rote/Papers/pdf/Division-free+algorithms.pdf
^ Bunch, J. R.; Hopcroft, J. E. (1974). "Triangular Factorization and Inversion by Fast Matrix Multiplication". Mathematics of Computation. 28 (125): 231–236. doi:10.1090/S0025-5718-1974-0331751-8.
^ Fang, Xin Gui; Havas, George (1997). "On the worst-case complexity of integer Gaussian elimination" (PDF). Proceedings of the 1997 international symposium on Symbolic and algebraic computation. ISSAC '97. Kihei, Maui, Hawaii, United States: ACM. pp. 28–31. doi:10.1145/258726.258740. ISBN 0-89791-875-4.
^ Bareiss, Erwin (1968), "Sylvester's Identity and Multistep Integer-Preserving Gaussian Elimination" (PDF), Mathematics of Computation, 22 (102): 565–578, doi:10.2307/2004533, JSTOR 2004533
^ abc Campbell, H: "Linear Algebra With Applications", pages 111–112. Appleton Century Crofts, 1971
^ ab Eves, H: "An Introduction to the History of Mathematics", pages 405, 493–494, Saunders College Publishing, 1990.
^ A Brief History of Linear Algebra and Matrix Theory : "Archived copy". Archived from the original on 2012-09-10. Retrieved 2012-01-24.CS1 maint: Archived copy as title (link)
^ Cajori, F. A History of Mathematics p. 80
^ Expansion of determinants in terms of minors: Laplace, Pierre-Simon (de) "Researches sur le calcul intégral et sur le systéme du monde," Histoire de l'Académie Royale des Sciences (Paris), seconde partie, pages 267–376 (1772).
^ Muir, Sir Thomas, The Theory of Determinants in the historical Order of Development [London, England: Macmillan and Co., Ltd., 1906].
JFM 37.0181.02
^ The first use of the word "determinant" in the modern sense appeared in: Cauchy, Augustin-Louis "Memoire sur les fonctions qui ne peuvent obtenir que deux valeurs égales et des signes contraires par suite des transpositions operées entre les variables qu'elles renferment," which was first read at the Institute de France in Paris on November 30, 1812, and which was subsequently published in the Journal de l'Ecole Polytechnique, Cahier 17, Tome 10, pages 29–112 (1815).
^ Origins of mathematical terms: http://jeff560.tripod.com/d.html
^ History of matrices and determinants: http://www-history.mcs.st-and.ac.uk/history/HistTopics/Matrices_and_determinants.html
^ The first use of vertical lines to denote a determinant appeared in: Cayley, Arthur "On a theorem in the geometry of position," Cambridge Mathematical Journal, vol. 2, pages 267–271 (1841).
^ History of matrix notation: http://jeff560.tripod.com/matrices.html
^ ab Gradshteyn, Izrail Solomonovich; Ryzhik, Iosif Moiseevich; Geronimus, Yuri Veniaminovich; Tseytlin, Michail Yulyevich (February 2007). "14.31". In Jeffrey, Alan; Zwillinger, Daniel. Table of Integrals, Series, and Products. Translated by Scripta Technica, Inc. (7 ed.). Academic Press, Inc. ISBN 0-12-373637-4. LCCN 2010481177. MR 2360010.

References
Axler, Sheldon Jay (1997), Linear Algebra Done Right (2nd ed.), Springer-Verlag, ISBN 0-387-98259-0
de Boor, Carl (1990), "An empty exercise" (PDF), ACM SIGNUM Newsletter, 25 (2): 3–7, doi:10.1145/122272.122273.
Lay, David C. (August 22, 2005), Linear Algebra and Its Applications (3rd ed.), Addison Wesley, ISBN 978-0-321-28713-7
Meyer, Carl D. (February 15, 2001), Matrix Analysis and Applied Linear Algebra, Society for Industrial and Applied Mathematics (SIAM), ISBN 978-0-89871-454-8, archived from the original on 2009-10-31
Muir, Thomas (1960) [1933], A treatise on the theory of determinants, Revised and enlarged by William H. Metzler, New York, NY: Dover
Poole, David (2006), Linear Algebra: A Modern Introduction (2nd ed.), Brooks/Cole, ISBN 0-534-99845-3
G. Baley Price (1947) "Some identities in the theory of determinants", American Mathematical Monthly 54:75–90 MR
0019078
Horn, R. A.; Johnson, C. R. (2013), Matrix Analysis (2nd ed.), Cambridge University Press, ISBN 978-0-521-54823-6
Anton, Howard (2005), Elementary Linear Algebra (Applications Version) (9th ed.), Wiley International
Leon, Steven J. (2006), Linear Algebra With Applications (7th ed.), Pearson Prentice Hall
External links
| The Wikibook Linear Algebra has a page on the topic of: Determinants |
Wikisource has the text of the 1911 Encyclopædia Britannica article Determinant. |
Suprunenko, D.A. (2001) [1994], "Determinant", in Hazewinkel, Michiel, Encyclopedia of Mathematics, Springer Science+Business Media B.V. / Kluwer Academic Publishers, ISBN 978-1-55608-010-4
- Weisstein, Eric W. "Determinant". MathWorld.
O'Connor, John J.; Robertson, Edmund F., "Matrices and determinants", MacTutor History of Mathematics archive, University of St Andrews.- Determinant Interactive Program and Tutorial
Linear algebra: determinants. Compute determinants of matrices up to order 6 using Laplace expansion you choose.- Matrices and Linear Algebra on the Earliest Uses Pages
- Determinants explained in an easy fashion in the 4th chapter as a part of a Linear Algebra course.
- Instructional Video on taking the determinant of an nxn matrix (Khan Academy)
"The determinant". Essence of linear algebra – via YouTube.
Linear algebra | ||
|---|---|---|
| Basic concepts |
|  |
| Vector algebra |
| |
| Multilinear algebra |
| |
| Matrices |
| |
Algebraic constructions |
| |
| Numerical |
| |
| ||


